Quadrupy - Quadruped Build
Arduino-based Quadruped Robot (not programmed)
Share on:Overview
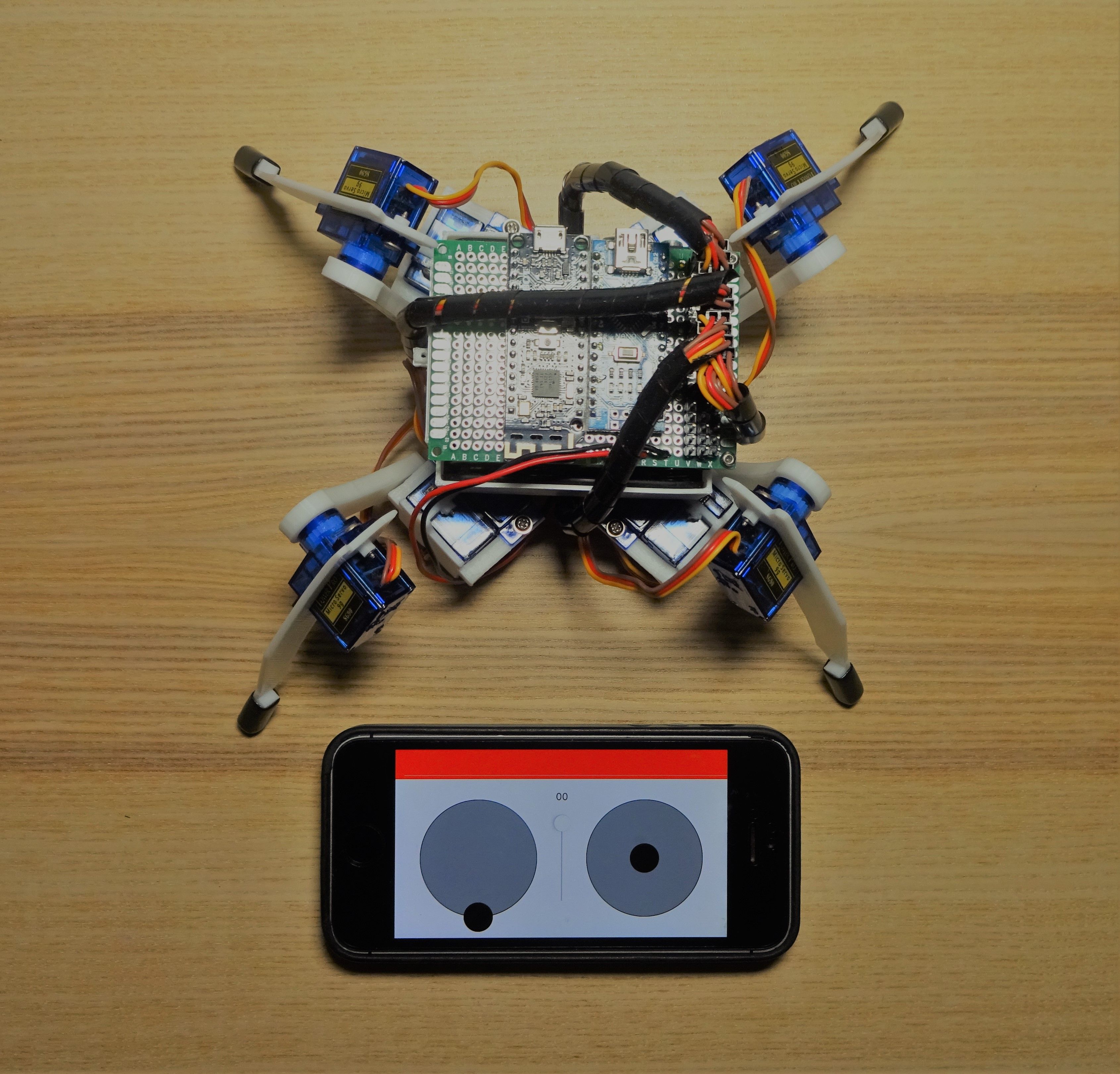
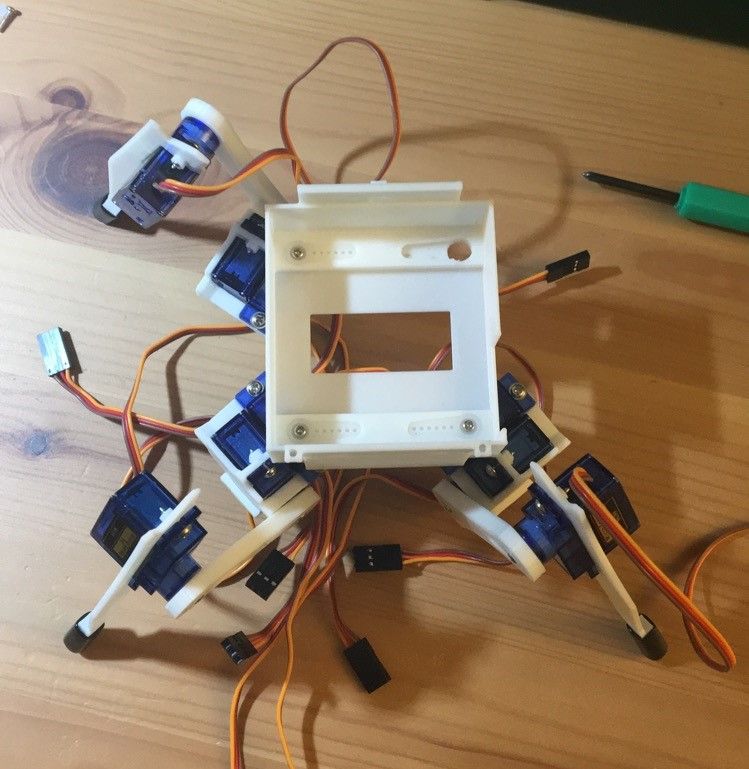
This project is propelled by 4 arms (12 motors) and 3 AA batteries in parallel. I did this project to test out smaller and more integrated robot body and easily replaceable batteries. The two Arduinos communicate with each other through I2C bus in order to extend the digital pin limit of a single Arduino (12 pins).
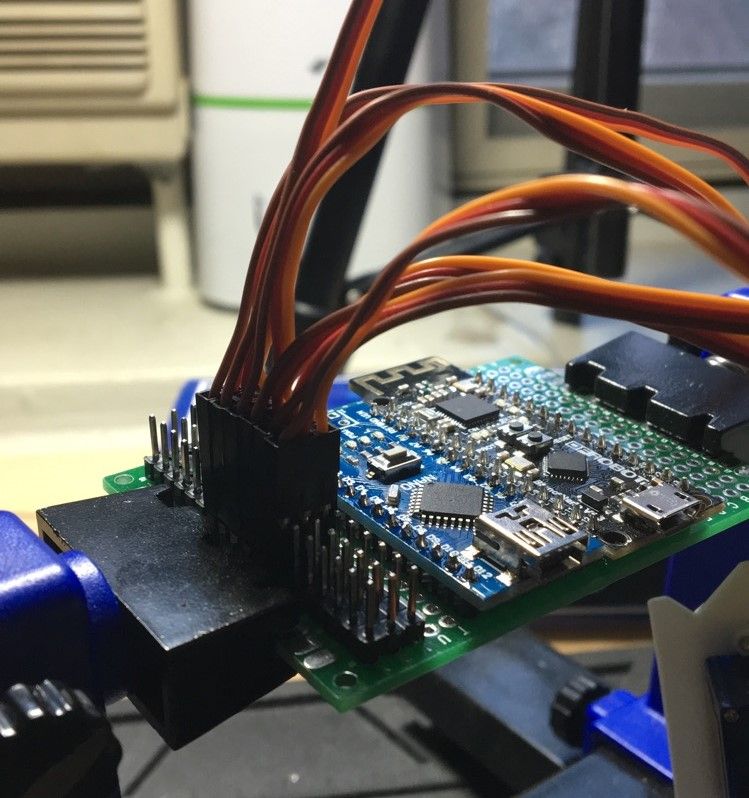
Soldering
3 rows of pins are soldered for motors and additional sensors. The bluno(Arduino with builtin bluetooth, in black) receives data from iOS wirelessly and sends it to a normal Arduino Nano that controls all the motors.
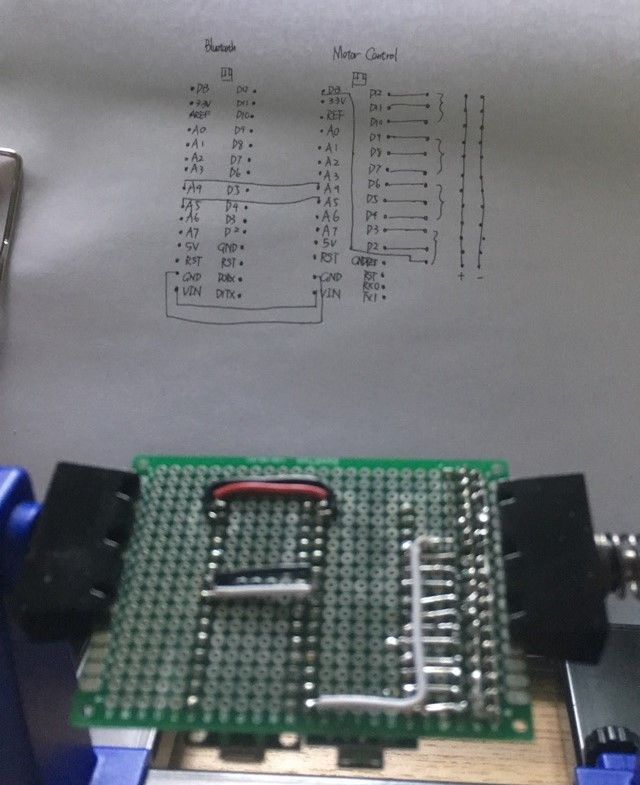
Schematics Sketch
The pin rows for + and - are soldered with single long wires. Later I would find out that too many devices in parallel could cause problems such as high current, heat dissipation, current noise, and backward-EMF(maybe not for simple servos). Thoughts on the setback of parallel circuit has led me to consider using Autodesk EAGLE to design professional 4-layered circuit with a more manageable current distribution and capacitors for new projects.
Battery Holder CAD
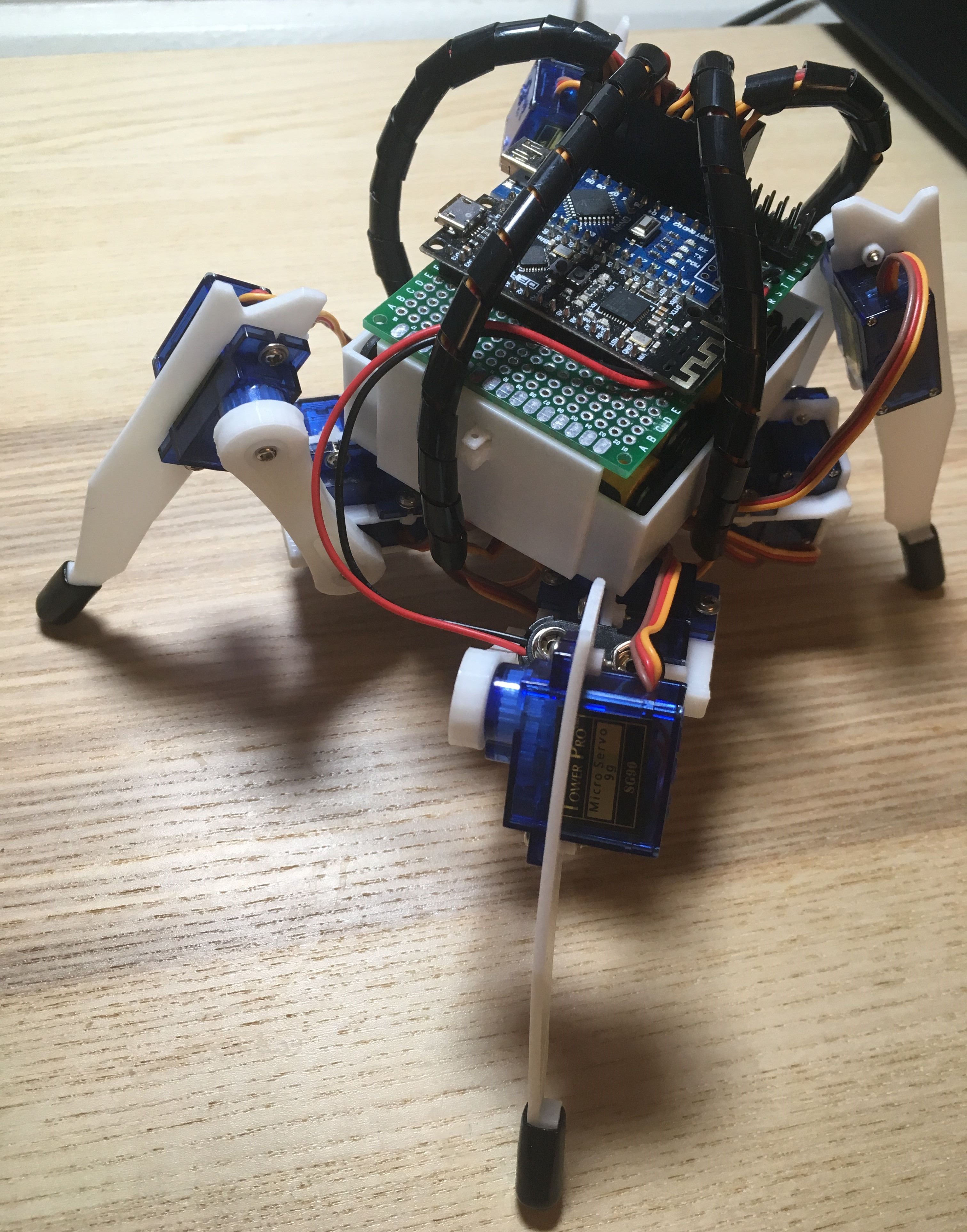
The battery encase is designed to hold the 3 AA batteries and secure the circuit board and 4 legs(each with 3 servos).
Assembly
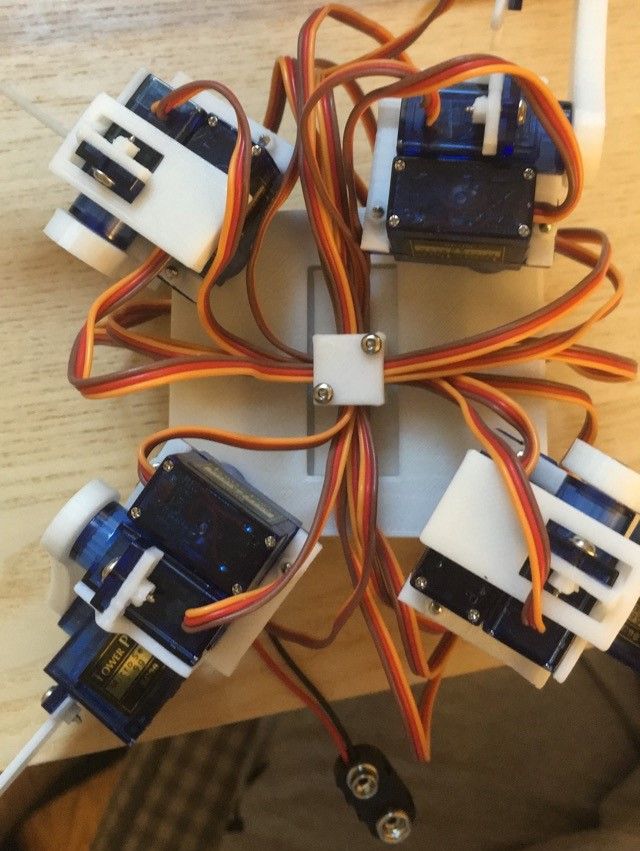
Beneath the Robot
The small plate under the robot secures all the wires.
Connecting the Battery
The robot is able to move all its legs properly with our iOS bluetooth controller. However, I stopped developing the walking algorithm when I found out the current noise problem that caused the cheap motors to jitter.
Links
Code: https://github.com/jiatinglu99/Arduino-Quadrupy
3D:
https://www.tinkercad.com/things/9Tl05sYYz3n
https://www.tinkercad.com/things/3SHUKZcpVOv